释放不对称的"无脑"机器人能自主导航穿越复杂迷宫
 站长云网
站长云网研究人员创造了一种软体机器人,这种机器人可以在没有人类或计算机指挥的情况下穿越简单的迷宫,它的非对称形状可以让他独立完成转弯并防止被困,现在,他们在这项工作的基础上创造了一种"无脑"软体机器人,这种机器人可以在更加复杂和动态的环境中导航。
"在我们早期的工作中,我们展示了我们的软体机器人能够在一个非常简单的障碍物中扭转方向,"相关论文的共同通讯作者、北卡罗来纳州立大学机械与航空航天工程系副教授尹杰说。"然而,除非遇到障碍物,否则它无法转弯。实际上,这意味着机器人有时会被卡住,在平行障碍物之间来回颠簸。"
"后来,我们开发出一种新型软体机器人,它能够自行转弯,使其能够穿过曲折的迷宫,甚至能够绕过移动的障碍物。而这一切都是利用物理智能完成的,而不是由计算机来引导"。
物理智能是指动态物体(如软体机器人)的行为受其结构设计和材料的支配,而不是由计算机或人工干预来指导。
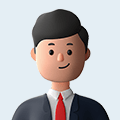
研究人员创造了一种软体机器人,这种机器人可以在没有人类或计算机指挥的情况下穿越简单的迷宫。该机器人的一半形状像一条扭曲的丝带,呈直线延伸,另一半形状像一条更紧密扭曲的丝带,也像螺旋阶梯一样绕着自己旋转。这种不对称设计意味着机器人的一端比另一端对地面施加更大的力。资料来源:北卡罗来纳州立大学,尹杰
材料和运动机制
与早期版本一样,新型软体机器人由带状液晶弹性体制成。当机器人被放置在温度至少为55摄氏度(131华氏度)(比周围空气温度高)的表面上时,软带接触表面的部分会收缩,而暴露在空气中的部分则不会收缩。这就产生了滚动运动;表面温度越高,机器人滚动得越快。
不过,前一版本的软体机器人采用对称设计,而新机器人则有明显的两半。其中一半的形状像一条扭曲的带子,呈直线延伸;另一半的形状像一条扭曲得更紧的带子,也像螺旋楼梯一样绕着自己旋转。
这种不对称设计意味着机器人的一端比另一端对地面施加更大的力。想想一个塑料杯,它的杯口比杯底宽。如果你把它从桌子上滚过,它不会沿直线滚动,而是会在桌面上划出一道弧线。这是因为它的形状不对称。
克服设计限制
论文第一作者、北卡罗来纳州立大学博士后研究员赵耀(音译)说:"我们的新型机器人背后的理念相当简单:由于它采用了不对称设计,因此无需接触物体就能转弯。因此,虽然当它接触到物体时仍能改变方向--使它能在迷宫中穿行--但它不会卡在平行物体之间。相反,它的弧形运动能力使它基本上可以扭动身体,获得自由。"
研究人员展示了非对称软体机器人设计的能力,它能在更复杂的迷宫(包括带有移动墙壁的迷宫)中导航,并能穿过比其身体尺寸更窄的空间。研究人员在金属表面和沙地上测试了新的机器人设计。不对称机器人的工作视频请点击这里:
"这项工作又向前迈进了一步,有助于我们开发软体机器人设计的创新方法--特别是针对软体机器人能够从环境中获取热能的应用,"Yin说。
踩一下[0]
顶一下[0]